
Wearable Robotics for Augmented Human Mobility & Functionality
Timeline
Oct 2024 - Jun 2025
TYPE
Academic
Engineering Design
Team Project
RoLE
Main Mechanical Designer
DELIVERABLEs
3D CAD model
Analysis
Physical Prototype
TOOLS

SolidWorks
Ansys
MATLAB

Arduino

ChatGPT
This is an engineering design project that aims to create a device with Variable Stiffness Actuators (VSAs) to help patients in knee rehabilitation exercises. This is the capstone project for my Bachelor Degree at VinUniversity, and a collaboration of four students from different engineering background.

problem
Knee rehabilitation is an important part of the recovery process for patients after an accident or surgery. This is a slow and inefficient process and requires a lot of support from clinicians. This heavy reliance on clinical expertise not only limits scalability but also places significant strain on healthcare resources.
goal
Design a device to replicate the support from clinicians during knee rehabilitation exercises by using Variable Stiffness Actuators.
Members & Responsibilities
Supervisor Professor
Provide assistance and guidance for the team. Help members navigate through obstacles to receive the desired result.
Duy-Quang (it's Me)
Mechanical Design & Analysis. Design the core mechanisms and elements of the device.
Collab in System Control.
Collab in System Control.
Member 2
Manufacturing. In charge of material selections, manufacturing methods and executions.
Collab in System Control.
Collab in System Control.
Member 3
Electrical Design. Responsible for the electrical components, focus on EMG signal processing & data gathering.
Collab in System Control.
Collab in System Control.
Member 4
AI application. Focus on training AI model to predict angle output from inputs of EMG signals.
Collab in System Control.
Collab in System Control.
THE Design PROCESS
I. Initial Research:
We examined current VSAs design via scientific entries to identifying the key features of VSAs:
Key characteristics of VSAs
Adjustable stiffness
Actuator adapts instantly to changing environments.
Elastic Components
Usually a spring. Ensures smooth, flexible movements.
Two motors
Dynamic stiffness control by two motors.
Control & Sensing
Real-time sensing for immediate responsiveness.
II. IdeatION:
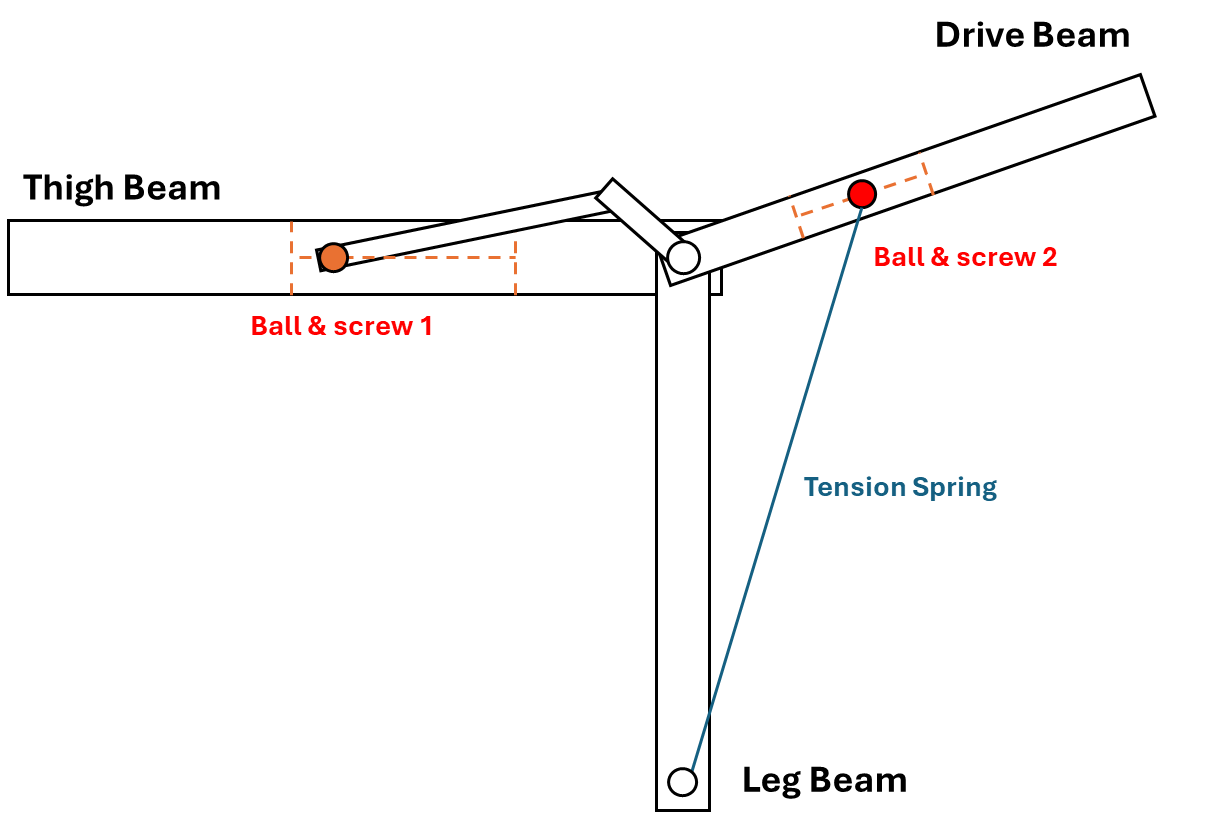
Our team came up with the elements for our device based on the research.
Elements of our device
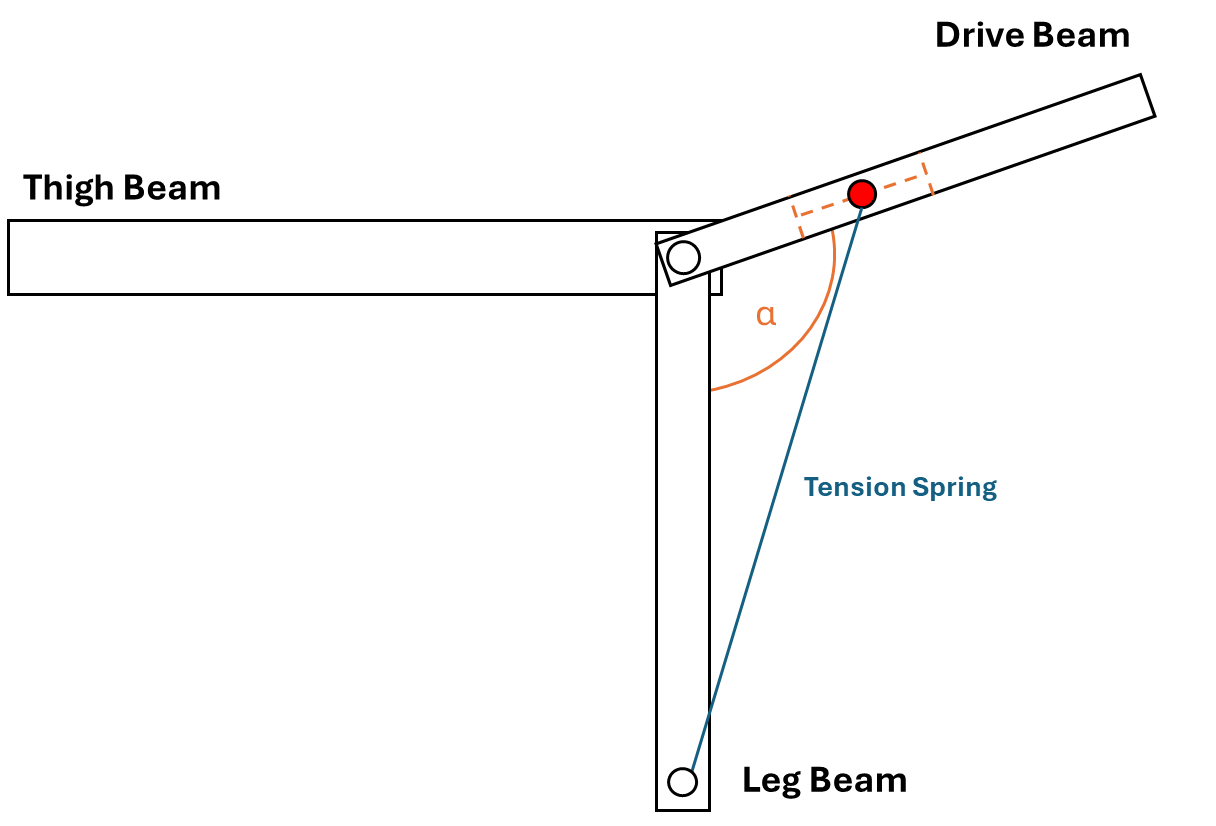
Beams
Consists of 3 main beams: thigh, leg, and drive beam.
Elastic Components
Tension spring attached between the drive beam and the leg beam.
Motors
Two high-torque stepper motors.
Principle
One motor moves beam angle, one adjusts spring position, real-time stiffness adaptation.
Sensing
Measure EMG sensors to get the electrical signals when the user move their legs.
Machine learning
AI model receive EMG signal as inputs and give out according angle.
As the main Mechanical Designer, my responsibilities revolve around design the mechanisms, choosing springs and motors. I also participate in the controlling process, providing mechanical insights.
Early Stage - Low Fidelity Design - SolidWorks
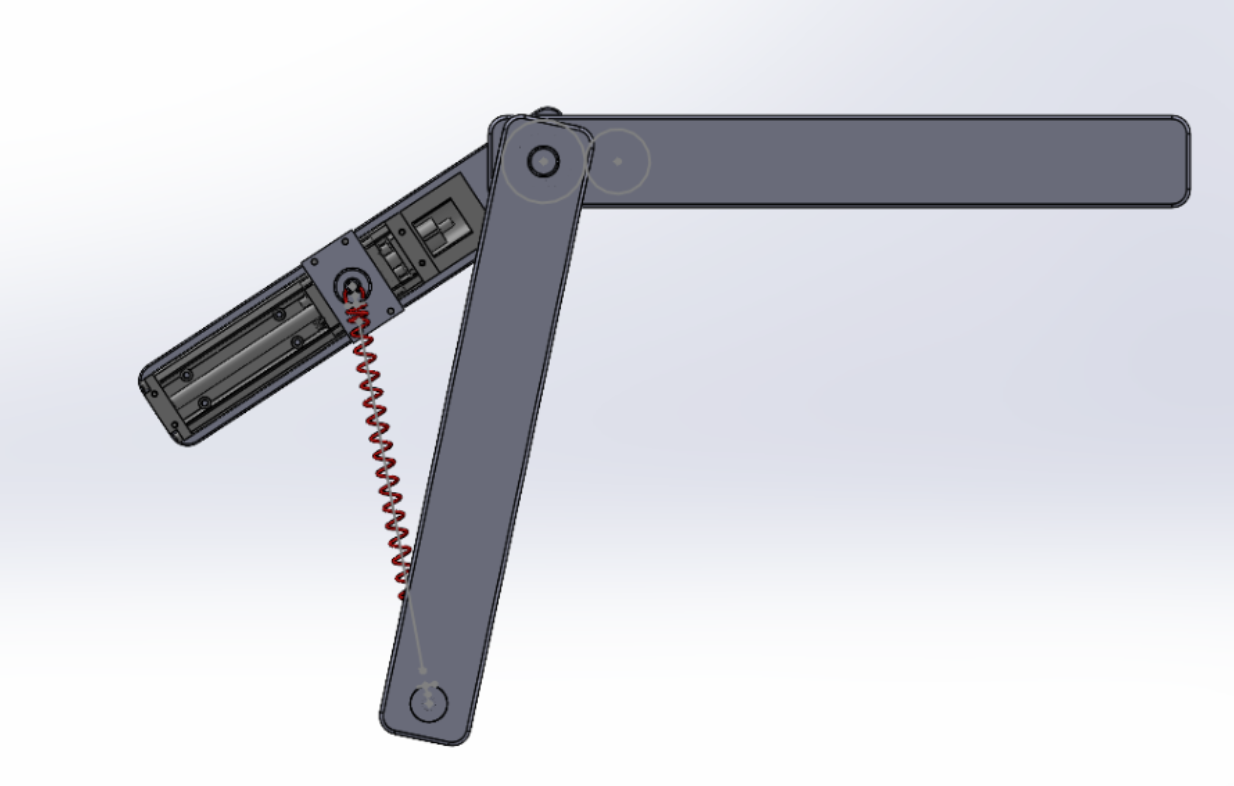
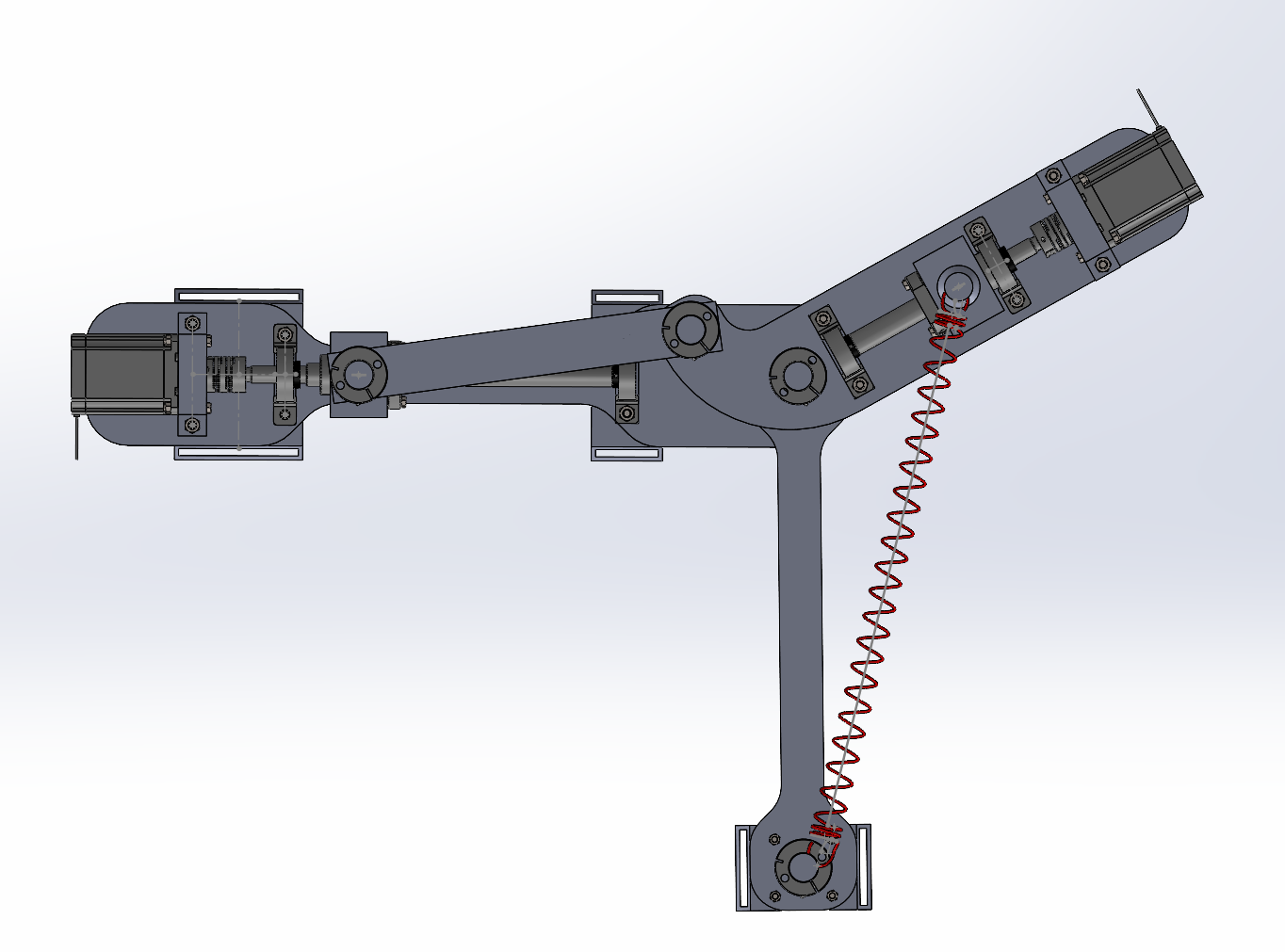
III. Mechanical Design:
After experimenting with different approach in SolidWorks, along with the guidance of our professor, our team decided that we would use two set of ball screw that convert the rotational motions of the motors to linear motions. The linear motions will then be used to control the angle of the drive beam through the principle of the crank-slider mechanism.
Mechanism Design
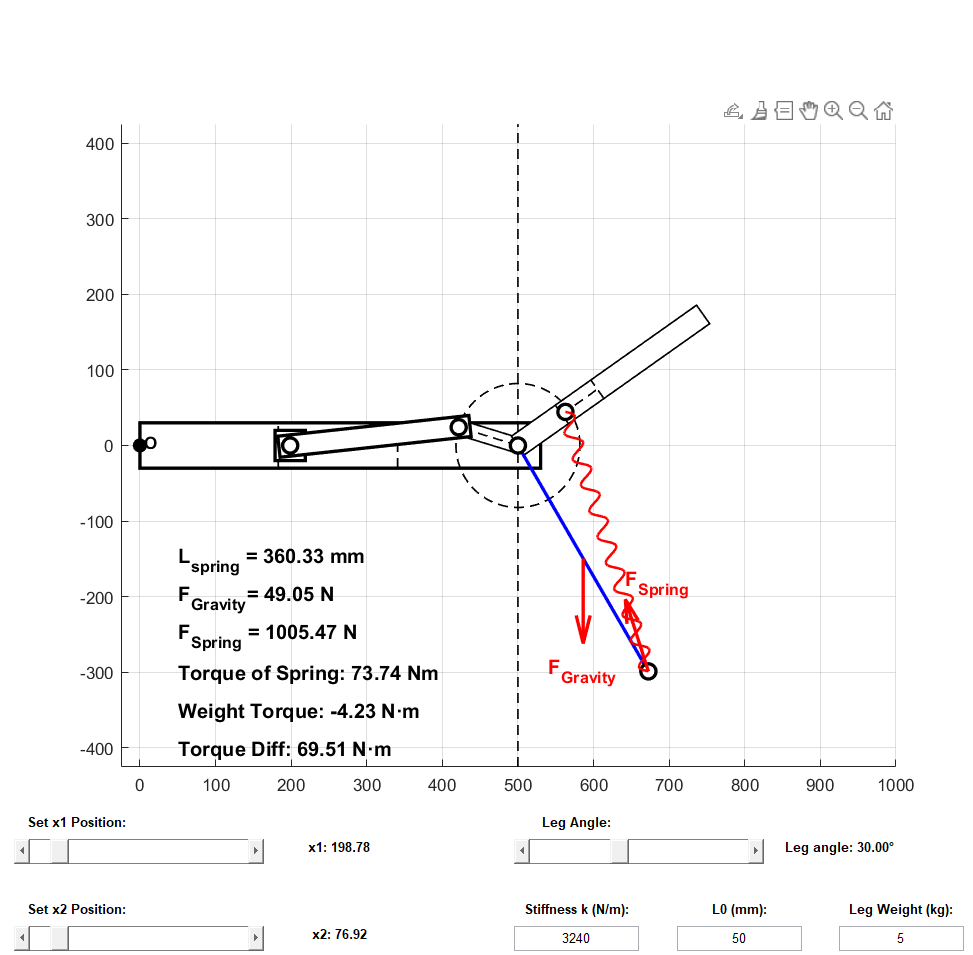
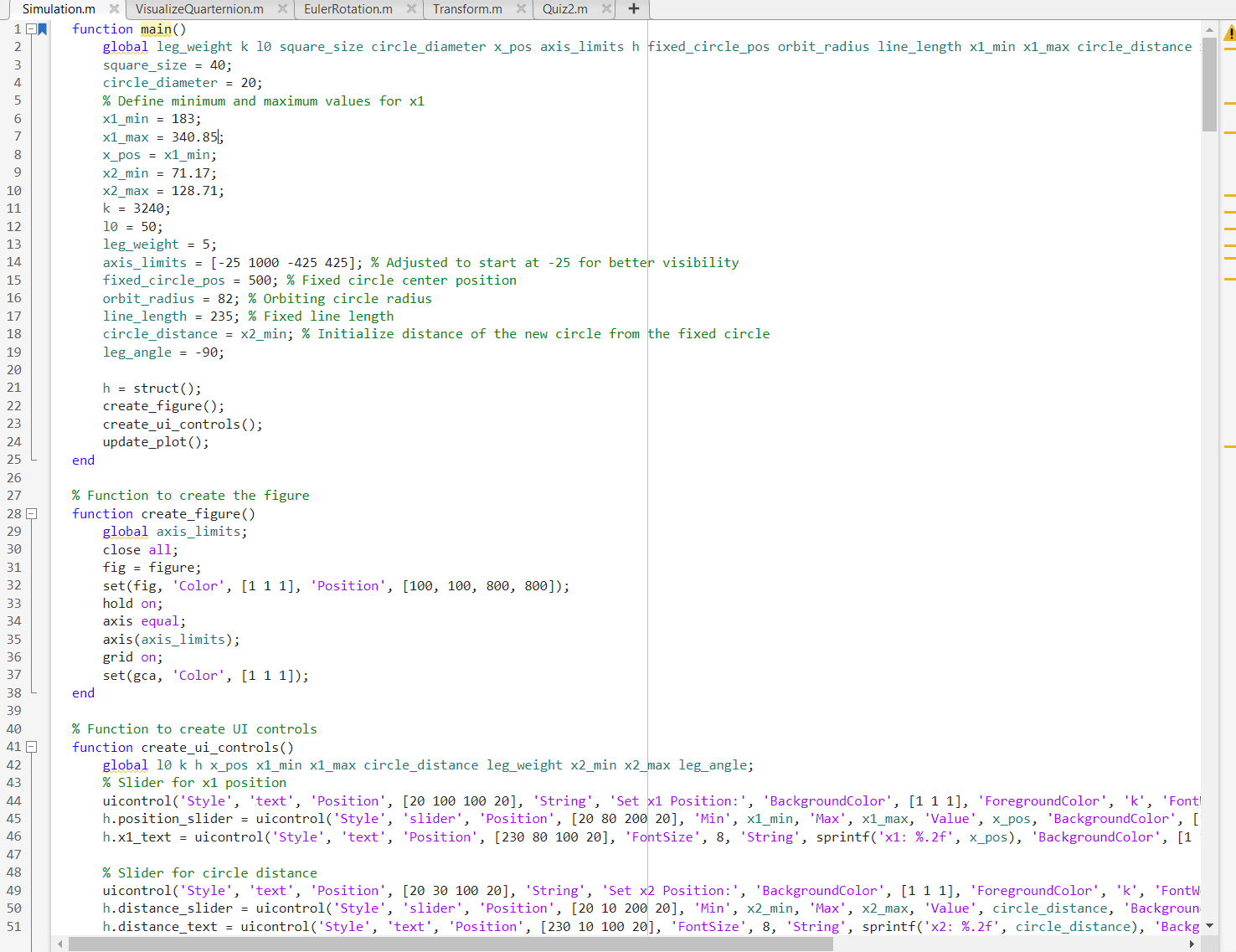
IV. Analysis & Simulation:
From the design, I create a dynamic model to help calculate the output torque of the device based on the positions of the motors and the leg's angle. I also use MATLAB & ANSYS with the help of ChatGPT to create a simulation of the device to better understand the torque relationship and the beam strength.
Dynamic model


MATLAB Simulation
ANSYS Simulation


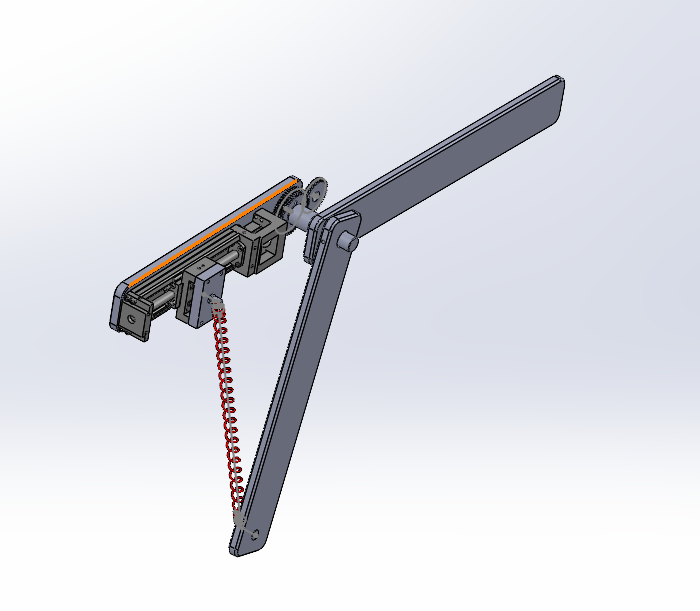
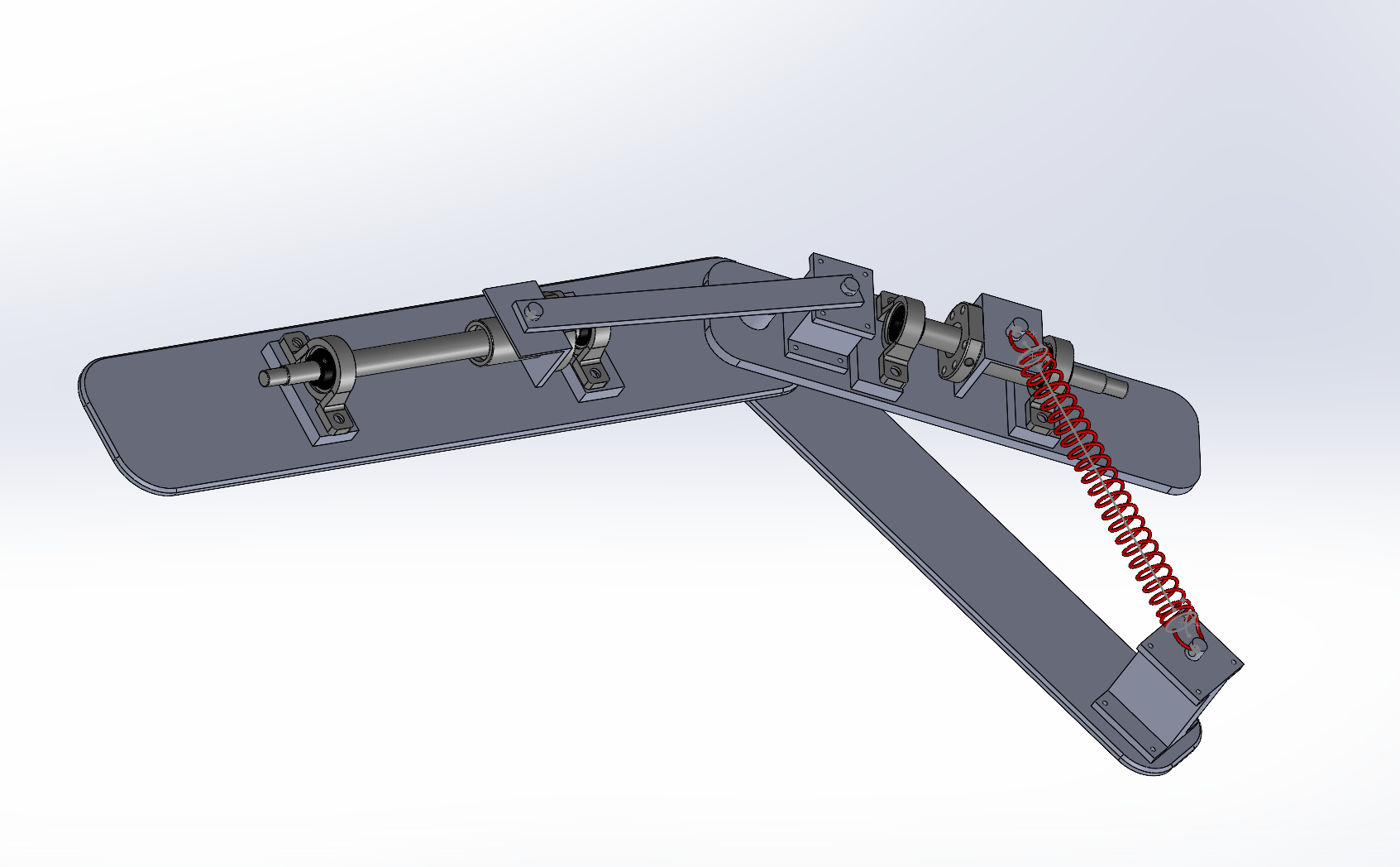
V. Prototyping:
With the High Fidelity Design, our team started working on the the physical prototype. The beams will be made by laser cutting MICA plates. The shafts will be made by CNC machines. Other elements will be bought or 3D printed.
Prototype 1.0
.jpg)
.jpg)
Problems & Solutions
Velcro Strap
3D printed strap too brittle, the location of the strap is not user friendly.
Solution
Convert the strap to MICA plates. Relocate the location of the strapping point.


Tolerance
Tolerance make the device is wobbly, with some parts cannot be fitted together.
Solution
Cut a plate with holes in different size to test the tolerance of the MICA plates. Use tapes to test the tolerance of the metal shafts. 3D printed with different size to test.



Beams
The beams made with 5mm MICA plates are bent due to the spring force and the device's weight.
Solution
Make the beam with 10mm MICA plates.


Failed Parts

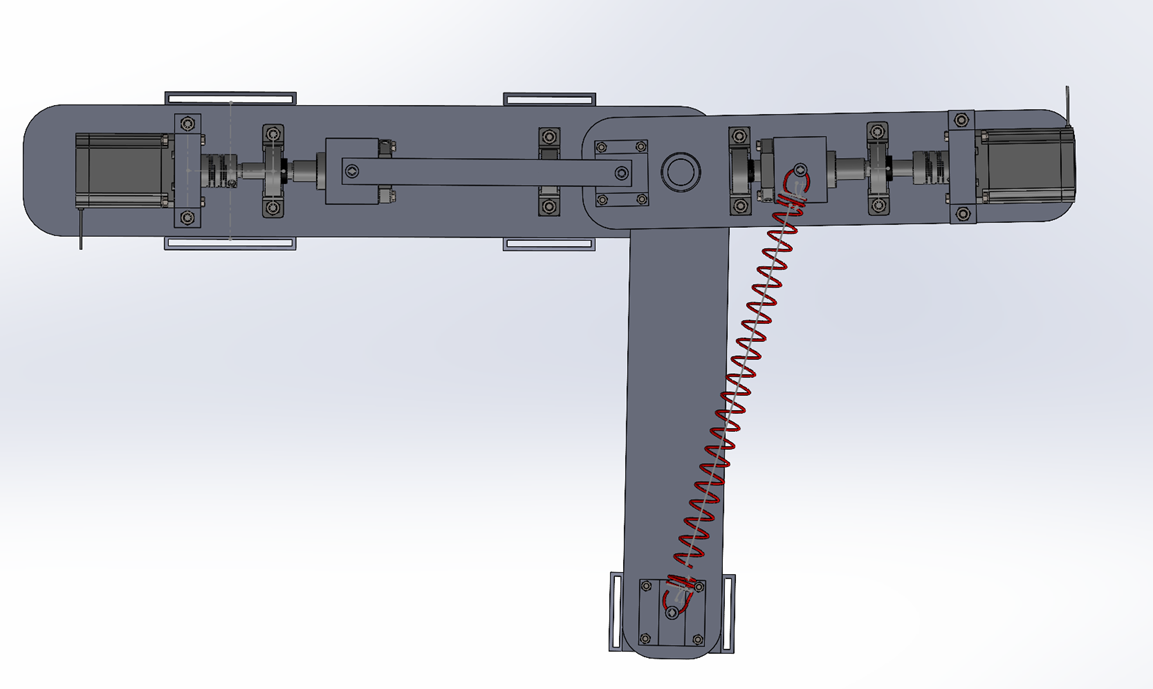
Prototype 2.0 (Final)
.jpg)
.jpg)
VI. Finalize:
Final Mechanical Design
System Architecture

Control Methods
Dynamic Equations

This Project is still in Progress.